自由设站监测深基坑支护结构变形的新方法
摘要:自由设站监测深基坑支护结构变形的新方法,使用经纬仪或电子经纬仪测量变形点的水平角和竖直角,自由测站,不需要量取仪器高度,外业操作简便,对施工影响小,不受施工现场场地狭窄的限制,能取得较好的代写工程硕士论文三维位移监测精度,为深基坑支护结构提供可靠的变形信息。
关键词:自由设站;深基坑支护结构;变形监测;虚拟像片
Abstract: In this paper, a new method of deformation monitoring for deep excavation supporting structure ispresented. Horizontal angle and vertical one of all surveying points on that were measured by /theodolite orelectronic theodolite. It was no need to measure the fixed station, surveying control points and instrumentalheight. These horizontal angles and vertical angelswere turned into virtual photo coordinate and rectangular spacecoordinate. The rectangular space coordinate of two periodswere analyzed to catch deformation information. Thismethod is notrestricted bysite condition. It cangive reliable information forthe safetyof foundation construction.Key words: virtual photograph method; deep excavation supporting structure; deformation monitoring; virtualphotograph
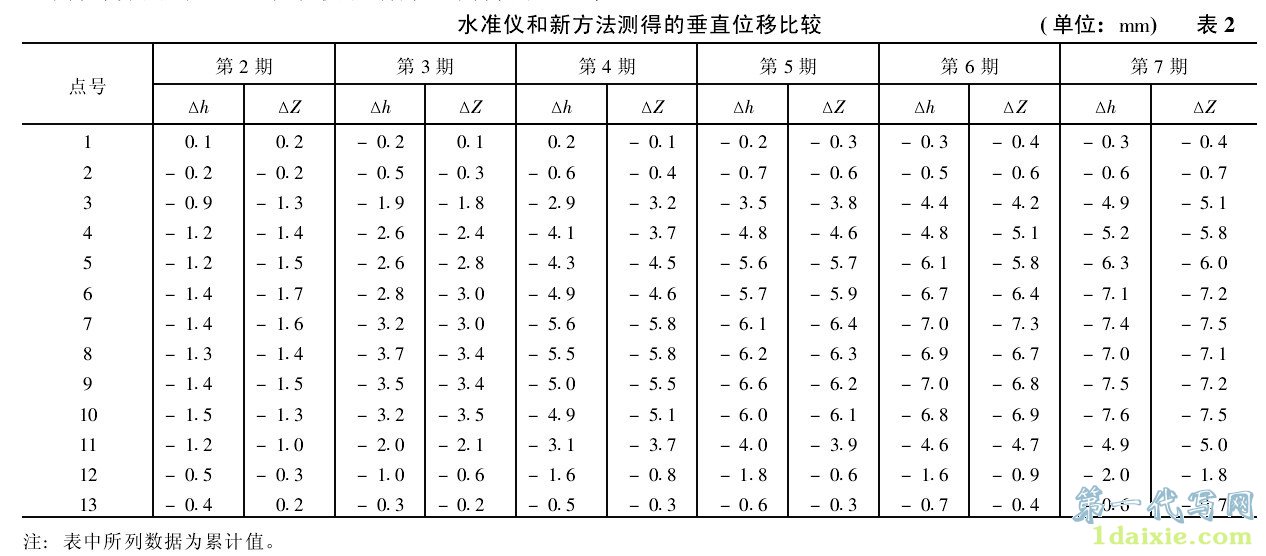
引言深基坑支护结构的失稳是造成工程事故的主要原因,不管其失稳原因和变形机理如何复杂,都能通过变形监测获取变形信息,对支护结构的稳定性能做出正确判断,分析失稳原因,采取有效措施避免事故发生,确保基础施工和相邻建筑物的安全。因此,深基坑支护结构变形的监测及治理一直是工程技术人员所关注的重要问题。现在国内外常用的监测方法是用精密水准测量测垂直位移,用导线、前方交会和极坐标等方法测水平位移[1]。水平位移观测需要事先在稳定之处建立控制点,进行控制测量,要求视线有足够的长度,测站点间要通视,经纬仪要对中等等。有时,由于施工现场场地狭窄水平位移则无法观测,只能用水准测量测垂直位移。由于岩土工程的复杂性,仅测出的垂直位移还不能全面、客观地反映支护结构的变形动态,无法准确地判断其未来的变形趋势,常常造成工程事故[2]。目前,国内有的学者用电子经纬仪前方交会法监测变形[3],但仍无法免除场地狭窄的制约。有的用高精度全站仪自由设站进行监测[4],但需购置昂贵的测量仪器,增加了监测成本。自由设站监测深基坑支护结构变形不需控制点、不设固定测站,不受场地条件限制,使用经纬仪或电子经纬仪不需仪器对中,不量取仪器高度,在两个及两个以上适当位置自由设站观测各标志点的水平方向值和竖直角一、两次测回,即可用程序计算出各点的虚拟像片坐标和物方空间三维坐标,再根据两期的物空三维坐标进行位移分析,则计算出各点的三维位移矢量。该方法简便易于操作,监测成本低廉,对施工干扰小,能及时有效地监测出支护结构的三维变形动态,为支护结构安全提供可靠而详实的变形信息。1 原理自由设站是用经纬仪或电子经纬仪测得各测点的水平方向值和竖直角转化为虚拟像坐标,并将在一个测站测得的测量转换值视为构成一张虚拟像片。经纬仪的竖轴、水平轴、视准轴的交点视为虚拟像片的投影中心,虚拟主光轴是水平角测量中水平方向最大观测值与最小观测值的平均水平方向值所代表的方向,且与经纬仪水平轴垂直,虚拟像片主距可任意取值,本文中取f=10000mm。当自由测站点为S,观测标志点A的水平方向48 12、13点距坑底6m,其它点距坑底约10m;在2个适当的位置自由设站安置J2经纬仪观测两测回,大约每5天观测一次,第一次始于基坑挖成后,直到该段坑壁稳定时止,共观测7次。由于各次观测时的现场状况不同,测站到测点所在支护结构的距离各次都不相同,大约在20m左右。同时,用水准仪监测沉降加以佐证。水准仪和新方法测得的垂直位移分别为Δh和ΔZ列于表2。由表2可以看出第2、3、4期基坑变形较大,施工企业及时调整了施工计划,并对该段支护结构进行了加固,避免了坑壁滑塌事故的发生。在主体的施工中,该技术及时监测出了主楼的三维变形动态,指导施工企业推迟了后浇带的浇筑,施工企业通过优化施工方法,纠正了倾斜变形,避免了不良后果的发生。水准仪和新方法测得的垂直位移比较(单位:mm)
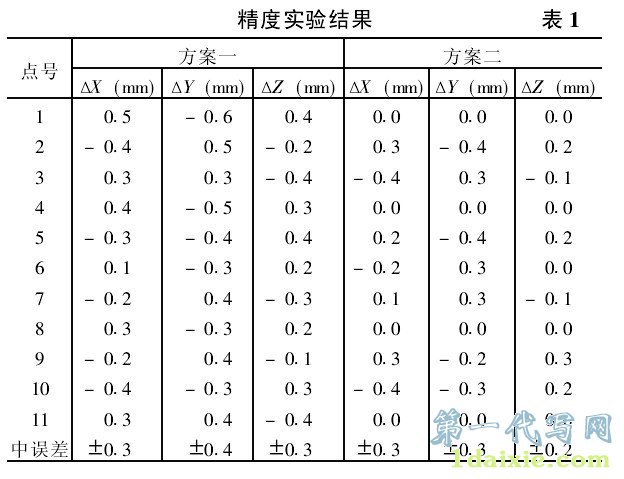
表2点号第2期第3期第4期第5期第6期第7期ΔhΔZΔhΔZΔhΔZΔhΔZΔhΔZΔhΔZ1 0•1 0•2 -0•2 0•1 0•2 -0•1 -0•2 -0•3 -0•3 -0•4 -0•3 -0•42 -0•2 -0•2 -0•5 -0•3 -0•6 -0•4 -0•7 -0•6 -0•5 -0•6 -0•6 -0•73 -0•9 -1•3 -1•9 -1•8 -2•9 -3•2 -3•5 -3•8 -4•4 -4•2 -4•9 -5•14 -1•2 -1•4 -2•6 -2•4 -4•1 -3•7 -4•8 -4•6 -4•8 -5•1 -5•2 -5•85 -1•2 -1•5 -2•6 -2•8 -4•3 -4•5 -5•6 -5•7 -6•1 -5•8 -6•3 -6•06 -1•4 -1•7 -2•8 -3•0 -4•9 -4•6 -5•7 -5•9 -6•7 -6•4 -7•1 -7•27 -1•4 -1•6 -3•2 -3•0 -5•6 -5•8 -6•1 -6•4 -7•0 -7•3 -7•4 -7•58 -1•3 -1•4 -3•7 -3•4 -5•5 -5•8 -6•2 -6•3 -6•9 -6•7 -7•0 -7•19 -1•4 -1•5 -3•5 -3•4 -5•0 -5•5 -6•6 -6•2 -7•0 -6•8 -7•5 -7•210 -1•5 -1•3 -3•2 -3•5 -4•9 -5•1 -6•0 -6•1 -6•8 -6•9 -7•6 -7•511 -1•2 -1•0 -2•0 -2•1 -3•1 -3•7 -4•0 -3•9 -4•6 -4•7 -4•9 -5•012 -0•5 -0•3 -1•0 -0•6 -1•6 -0•8 -1•8 -0•6 -1•6 -0•9 -2•0 -1•813 -0•4 0•2 -0•3 -0•2 -0•5 -0•3 -0•6 -0•3 -0•7 -0•4 -0•6 -0•7注:表中所列数据为累计值。
对定向,求出每一个虚拟像片投影中心坐标、外方位角元素(实际上就是经纬仪旋转中心位置及经纬仪姿态)、目标点的三维坐标,这些中间结果作为其后进行的光束平差的初始值。在改进后的光束平差计算理论,控制条件可以以基准杆为相对控制条件,也可以是事先建立的控制点。当以基准杆为相对控制条件时,基准杆上的一个标志点为物空坐标系的坐标原点,基准杆的长度方向的两标志点所构成的直线为一物空坐标轴,该两标志点的长度和其它定长杆的长度用来确定比例因子,进而计算出代数参数。当采用控制条件为控制点时,要至少设置三个固定的控制点,用于求解虚拟的外方位元素,但会增加测量工作量。施工场地狭窄时,往往不具备设置控制点的条件。相对定向中采用的改进后的4个代数参数代替三角函数构成旋转矩阵,避免了方向余弦的多值性,具有较强的收敛能力,可以保证经纬仪测站任意布置、不置平观测(等同于摄站任意交向、任意构形)的情况下,无需任何初始值,都会可靠地计算出虚拟像片的外方位元素,供光束法平差使用。测站点坐标通过观测基准杆和已知边或者观测固定的控制点的水平角和竖直角,利用后方交会测定。当各测点的两期三维坐标计算出来后,进行位移分析,位移分析的基础理论是附有已知条件的自由网平差和拟稳平差[7]。位移分析的软件系统根据光束平差提供的两期坐标找出哪些点是动点,哪些是不动点;若所有点都在移动,则根据位移场的重心分析出两期的位移值,当各测点的两期三维坐标计算出来后,利用该模型解算出各测点的三维位移量或两维位移量。
2 精度实验为了确定该方法变形监测精度,在室外进行了模拟精度实验。在长约30余米的墙面上设置11个测点标志(用彩纸做成的三角形),离地面高约4m,水平间隔约3m。然后,用两种方案进行精度实验。方案一:在墙面上垂直自由悬挂一根基准杆(杆长2m,用三角形作标志点),用J2经纬仪在距墙面的垂距为20m的地方选择两适当位置自由设站,用方向法测量测点标志的水平方向值和竖直角两测回,计算出各测点的三维坐标,并将这些坐标视为真值。再在两个适当位置重新自由设站安置J2经纬仪,用同样的方法观测测点标志的水平方向值和竖直角,计算它们的三维坐标,并与真值进行比较得到各测点的坐标差,运用中误差定义计算三维坐标的中误差(见表1)。方案二:首先用常规测量方法精密测定11个测点中的1、4、8和11点的三维坐标,再在距墙面约20m垂距的两个适当的位置自由设站安置J2经纬仪,用方向法测量测点标志(含1、4、8、11点)的水平方向值和竖直角两测回,计算出各测点的三维坐标,并将这些坐标视为真值。再重新选择两个适当的测站位置自由设站,观测测点标志的水平方向值和竖直角两测回,计算出各测点的三维坐标,并与真值进行比较得到各测点的坐标差,运用中误差定义计算三维坐标的中误差(见表1)。精度实验结果表1点号方案一方案二ΔX(mm)ΔY(mm)ΔZ(mm)ΔX(mm)ΔY(mm)ΔZ(mm)1 0•5 -0•6 0•4 0•0 0•0 0•02 -0•4 0•5 -0•2 0•3 -0•4 0•23 0•3 0•3 -0•4 -0•4 0•3 -0•14 0•4 -0•5 0•3 0•0 0•0 0•05 -0•3 -0•4 0•4 0•2 -0•4 0•26 0•1 -0•3 0•2 -0•2 0•3 0•07 -0•2 0•4 -0•3 0•1 0•3 -0•18 0•3 -0•3 0•2 0•0 0•0 0•09 -0•2 0•4 -0•1 0•3 -0•2 0•310 -0•4 -0•3 0•3 -0•4 -0•3 0•211 0•3 0•4 -0•4 0•0 0•0 0•0中误差±0•3±0•4±0•3±0•3±0•3±0•2 方案一中是以基准杆为控制条件,基准杆的下部端点为坐标原点,向上为Z坐标轴,水平方向向右为X值增加的方向, Y轴与它们构成右手坐标系。方案二中是以控制点为控制条件,其坐标系统可与测量坐标系一致,也可不同,本实验中采用独立坐标系,坐标轴的方向与方案一方向平行。
3 实际应用自由设站监测深基坑支护结构变形的新方法在石家庄某施工现场进行了应用。该建筑物地上为26层、地下两层,筏板基础,框剪结构。基坑采用大开挖,南北长136m,东西长128m,基坑深12m,喷锚结构支护,冬季施工。尽管其距附近高楼甚远,但距基坑东侧不足3m处有一纵贯南北、埋深达4m的电缆沟,其基础位于该电缆沟的中部长约40余米的地段,其坑壁土壤曾受过扰动,再加上冬季的冻融作用对该段基础施工构成威胁。为确保其施工安全,采用虚拟像片法对该段支护结构进行了监测。在监测过程中,将13个标志设支护结构上, 1、2、50 期 值为βA,竖直角为αA时,由图1可知标志点A在该站所成虚拟像片上点a的虚拟像坐标为:xa=f×tanβ(1)za=f2+x2a×tanαA(2)(1)式中β=βA-β0(3)β0为虚拟像片在主光轴所代表的水平方向观测值。图1 虚拟像片示意图由水平方向值和竖直角生成虚拟像片并未要求经纬仪旋转轴一定要铅垂,所以用经纬仪进行观测时可以不用整平。将虚拟像片坐标转换为物方空间坐标系中可以以基准杆为基准建立坐标系,也可以由已知控制点来确定物方空间坐标系,经纬仪或电子经纬仪的竖轴、水平轴、视准轴的交点(投影中心)的坐标可由后方交会求出,再根据测得的竖直角和反算出的水平距离进而求出投影中心的高程,故可自由设站和不必量取仪器高度。每一张虚拟像片组成的一束光线作为平差的基本单元,以投影中心、像点和相应地面点的共线方程作为平差的基础方程[5]。通过各个光束在空间的旋转和平移,使各模型之间公共点的光线实现最佳地交会,并使整个区域最佳地纳入到已知的控制条件上去。这里的旋转相当于光线束的外方位角元素,而平移相当于摄站点的空间坐标。在图2中,由地面点、像点和投影中心的共线方程可以得到像点坐标和物空坐标的关系为:xy-f=λa1b1c1a2b2c2a3b3c3X-XsY-YsZ-Zs(4)式中x、y为目标A的像坐标,f为摄影机主距X、Y、Z为目标A的物空坐标,Xs、Ys、Zs为投影中心的物空坐标,ai、bi、ci为坐标变换的方向余弦,λ为比例因子。要将像空坐标转换成物空坐标,通常需要设置一些控制点解算出九个方向余弦。图2 虚拟像片上各点关系示意图为了避免方向余弦的多值性,采用了用四个代数参数代替九个方向余弦的光束平差新理论(P-H算法[6],见(5)式),式中S为比例因子,R为旋转矩阵。xy-f=SRX-XsY-YsZ-Zs(5)式中/R=d2+a2-b2-c22 (ab+cd) 2 (ac-bd)2 (ab-cd)d2-a2+b2-c22 (bc+ad)2 (ac+bd) 2 (bc-ad)d2-a2-b2+c2其中d= 1-a2-b2-c2。
P-H算法仍需设置三个以上的控制点。因此,对四个代数参数的算法进行了改进。在被监测物体前后放置一基准杆(竖直或水平)和定长杆(任意),以基准杆上的一个标志点为物空坐标系的坐标原点,基准杆的长度方向的两标志点所构成的直线为一物空坐标轴,该两标志点的长度和其它已知边(定长杆的长度)用来确定比例因子,使得不设控制点进行立体重建、计算各点的三维坐标成为可能。在虚拟像片法中以最左端测站生成的虚拟像片为第一片,其它测站生成的虚拟像片为第二片、第三片、……。根据虚拟像片在空间的分布位置和重叠部分的测点,虚拟像片从左到右依次衔接做相对定向,相邻两片构成一个虚拟像对,自动形成独立的立体模型,由左到右一个虚拟像对一个虚拟像对用相对定向依次构成孤立的立体模型,再通过模型连接构成统一的模型,利用控制条件进行模型的绝
4 结语自由设站监测深基坑支护结构变形的新方法只需要1台经纬仪即可,对硬件的要求低,易于实现;经纬仪无须对中,测站间无须通视、定向,对现场观测条件要求大为降低,外业工作量大为减少;对于控制条件的要求也十分灵活、宽松,可以很方便地加入相对控制,有助于提高系统测量精度;软件系统无须提供虚拟像片外方位元素及测点坐标初值,数据处理方便易行,具有完整的精度评定、粗差探测功能,可以保证测量系统的可靠性。
参考文献
[1] 代写工程硕士论文黄立人,姚忠杰,王若柏.深基坑施工中的变形监测[J].测绘工程, 1997, (3): 7~13.
[2] 李兴亚,熊乾.天津塘沽广联商城深基坑支护工程事故分析及处理[J].铁道建筑技术, 1999, (6): 30~32.
[3] 李小鹏.以电子经纬仪为传感器的无接触三维精密定位测量系统[J],测绘工程, 1995, (1): 31~37.
[4] 李会青,张伟.非固定站差分法在深基坑监测中的应用[J].工程勘察, 2003, (2): 59~61.
[5] 李德仁.解析摄影测量学[M].北京:测绘出版社, 1992,6~73.
[6] 曾卓乔.一种不测定初始值地近景摄影处理微机程序[J].测绘学报, 1990, 19 (4): 298~306.
[7] 陶本藻.自由网平差与变形分析[M].北京:测绘出版社,1984, 89~129.51 2007年第3期工程勘察 Geotechnical Investigation &Surveying